Endoluminal Devices Actuated with Multiple Magnets
Navigation at a smaller scale (3-6mm lumen diameter, e.g. small bronchi), may require minimal interaction between the overall length of the endoluminal device and the surroundings (see Fig. 2). In those cases, we can naturally embed little magnetic material (due to size) and interaction with the anatomy may cause inherent loss in propelling forces. For this reason, I worked on two main aspects: embedding magnetic particles along the overall length of the tentacle (augmented magnetic content); controlling the magnetic signature (lengthwise magnetization profile) of the tentacle so that it follows the anatomy during insertion, as it reacts to the applied magnetic field.
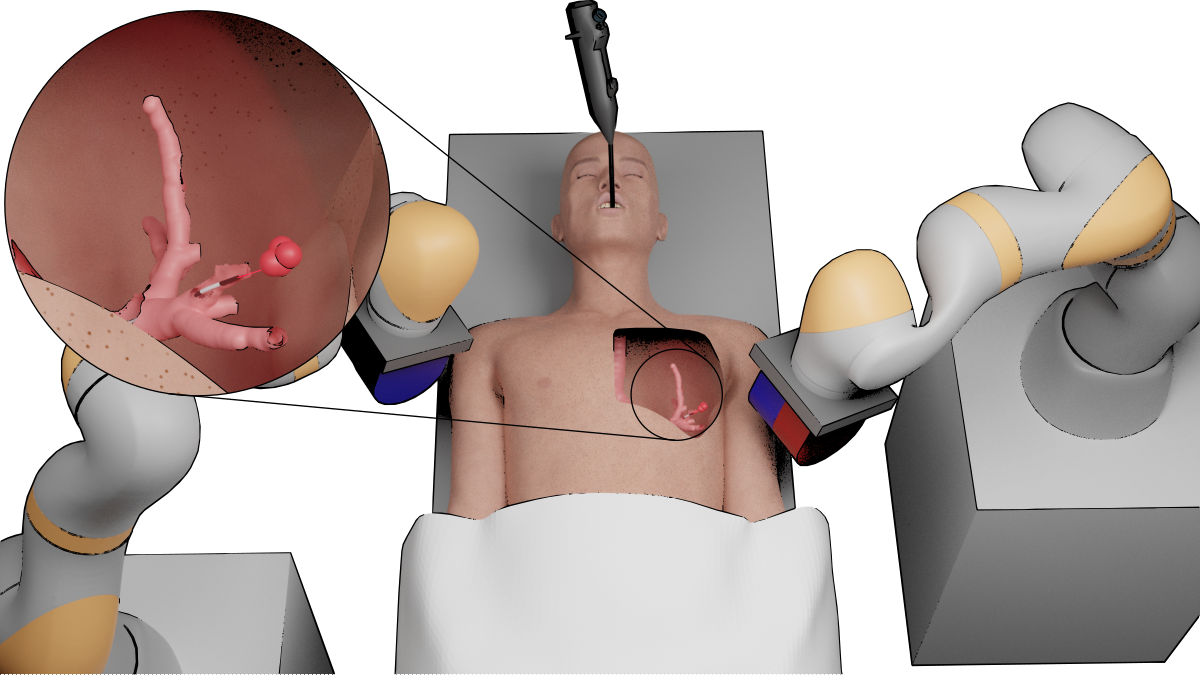
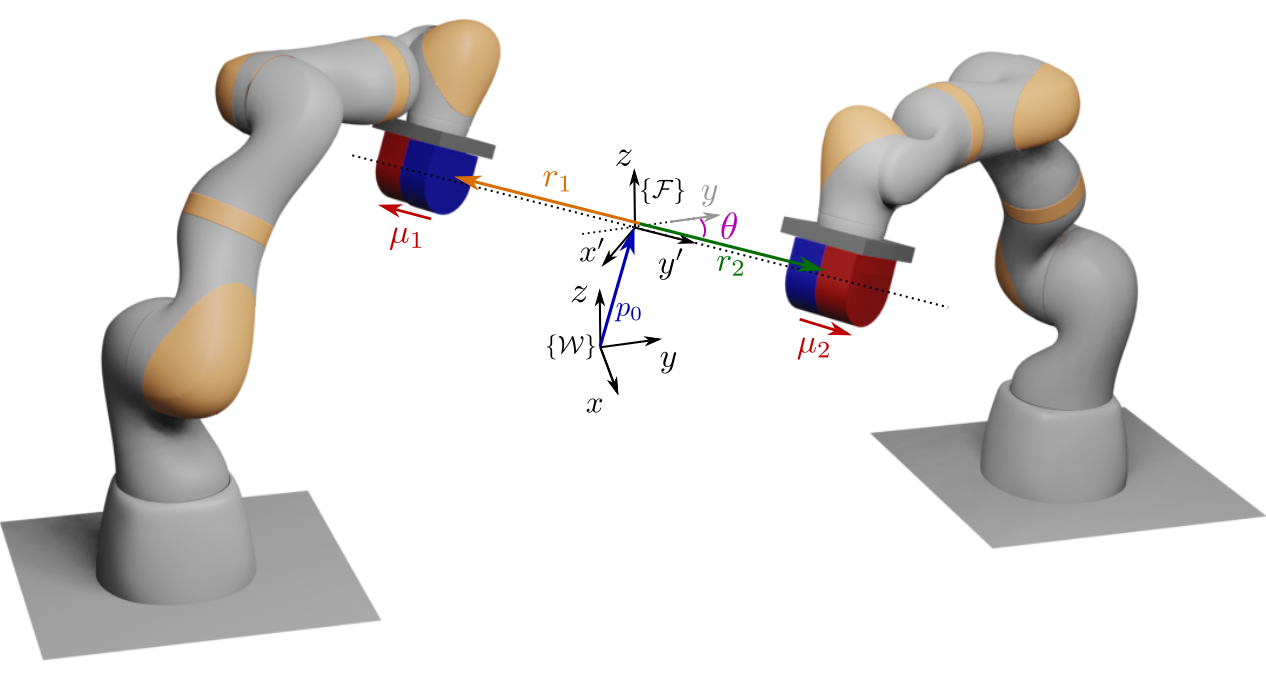
To independently actuate multiple sections of the magnetic tentacle, I investigated the use of two robotically actuated permanent magnets. I demonstrated that this control strategy can manipulate multiple independent magnetic degrees of freedom, which is fundamental in navigating small-scale tentacles deep in the anatomy. In the following videos, from our work on IEEE Transactions on Robotics , we show the results of measuring the magnetic field (on the left) and the magnetic force applied on two permanent magnets (on the right), measured using two load cells.
We have shown successful navigation in the bronchial tree, using real-time localization to inform supervised autonomy. Using pre-operative imaging, the magnetic tentacle is designed and fabricated to autonomously navigate inside the anatomy. Details about the patient-specific design was published in Soft Robotics (SoRo) and navigation for targeted laser therapy can be found on Nature Communications Engineering
References
2023
Collaborative Magnetic Manipulation via Two Robotically Actuated Permanent Magnets
Giovanni Pittiglio, Michael Brockdorff, Tomas Veiga, and 3 more authors
IEEE Transactions on Robotics, 2023
Closed Loop Static Control of Multi-Magnet Soft Continuum Robots
Giovanni Pittiglio, Andrew L. Orekhov, Tomas Veiga, and 4 more authors
IEEE Robotics and Automation Letters, 2023
Personalized magnetic tentacles for targeted photothermal cancer therapy in peripheral lungs
Giovanni Pittiglio, James H. Chandler, Tomas Veiga, and 8 more authors
Lung cancer remains one of the most life-threatening diseases and is currently managed through invasive approaches such as surgery, chemo- or radiotherapy. In this work, we introduce a novel method for the targeted delivery of a therapeutic laser for the treatment of tumors in peripheral areas of the lungs. The approach uses a 2.4\thinspacemm diameter, ultra-soft, patient-specific magnetic catheter delivered from the end of a standard bronchoscope to reach the periphery of the lungs. Integrated shape sensing facilitates supervised autonomous full-shape control for precise navigation into the sub-segmental bronchi, and an embedded laser fiber allows for treatment via localized energy delivery. We report the complete navigation of eight primary lumina in the bronchi of an anatomically accurate phantom (developed from computed tomography (CT) data) and successful laser delivery for photothermal ablation. We further evaluate the approach in three diverse branches of excised cadaveric lungs, showing a mean improvement in navigation depth of 37% with less tissue displacement when compared to a standard semi-rigid catheter and navigation depth repeatability across all tests of <1\thinspacemm.
2022
Patient-Specific Magnetic Catheters for Atraumatic Autonomous Endoscopy
Giovanni Pittiglio, Peter Lloyd, Tomas Veiga, and 4 more authors
Despite increasing interest in minimally invasive surgical techniques and related developments in flexible endoscopes and catheters, follow-the-leader motion remains elusive. Following the path of least resistance through a tortuous and potentially delicate environment without relying on interaction with the surrounding anatomy requires the control of many degrees of freedom. This typically results in large-diameter instruments. One viable solution to obtain dexterity without increasing size is via multiple-point magnetic actuation over the length of the catheter. The main challenge of this approach is planning magnetic interaction to allow the catheter to adapt to the surrounding anatomy during navigation. We design and manufacture a fully shape-forming, soft magnetic catheter of 80 mm length and 2 mm diameter, capable of navigating a human anatomy in a follow-the-leader fashion. Although this system could be exploited for a range of endoscopic or intravascular applications, here we demonstrate its efficacy for navigational bronchoscopy. From a patient-specific preoperative scan, we optimize the catheters’ magnetization profiles and the shape-forming actuating field. To generate the required transient magnetic fields, a dual-robot arm system is employed. We fabricate three separate prototypes to demonstrate minimal contact navigation through a three-dimensional bronchial tree phantom under precomputed robotic control. We also compare a further four separate optimally designed catheters against mechanically equivalent designs with axial magnetization profiles along their length and only at the tip. Using our follow-the-leader approach, we demonstrate up to 50% more accurate tracking, 50% reduction in obstacle contact time during navigation over the state of the art, and an improvement in targeting error of 90%.
 Collaborative Magnetic Manipulation via Two Robotically Actuated Permanent MagnetsIEEE Transactions on Robotics, 2023
Collaborative Magnetic Manipulation via Two Robotically Actuated Permanent MagnetsIEEE Transactions on Robotics, 2023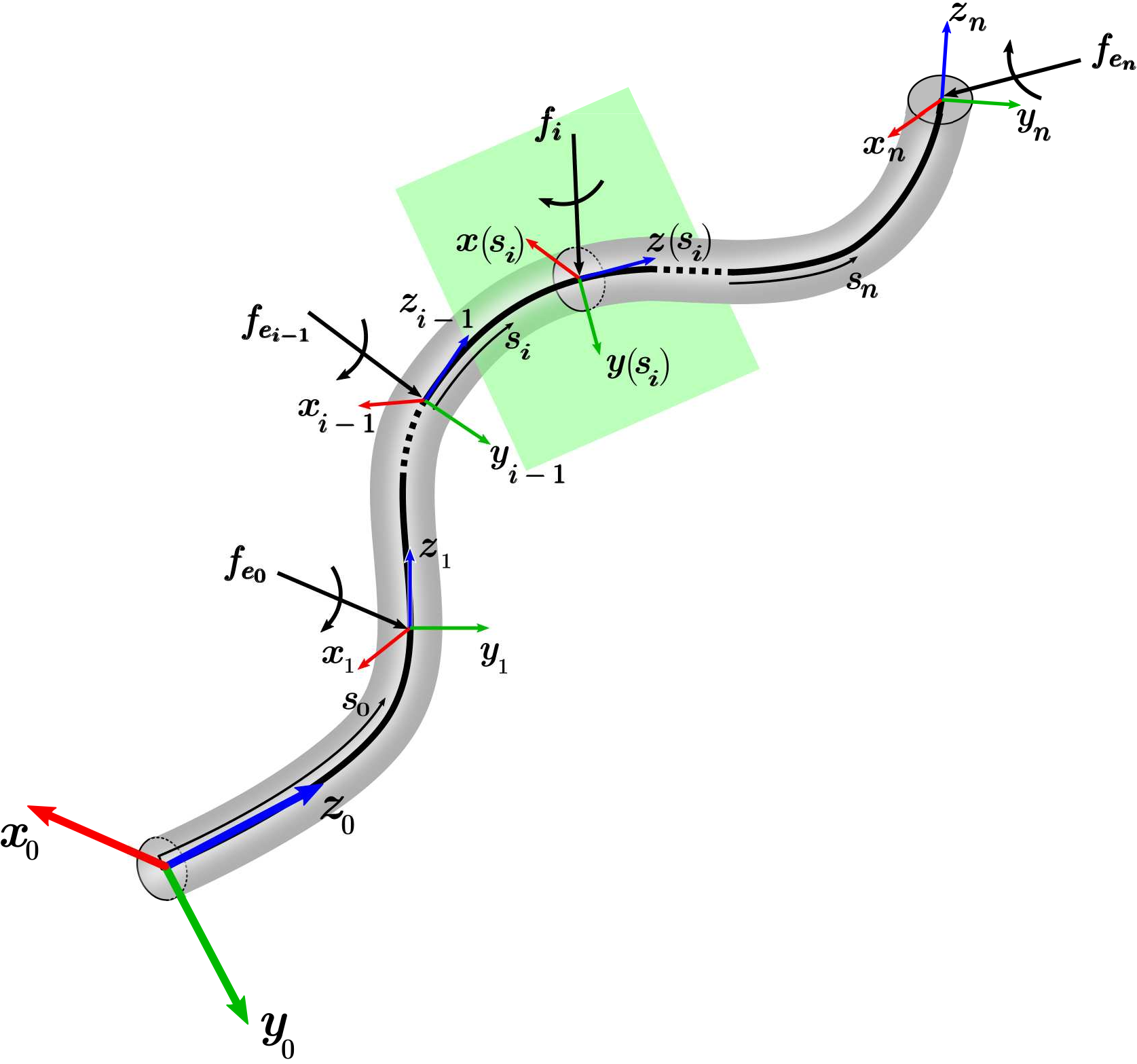 Closed Loop Static Control of Multi-Magnet Soft Continuum RobotsIEEE Robotics and Automation Letters, 2023
Closed Loop Static Control of Multi-Magnet Soft Continuum RobotsIEEE Robotics and Automation Letters, 2023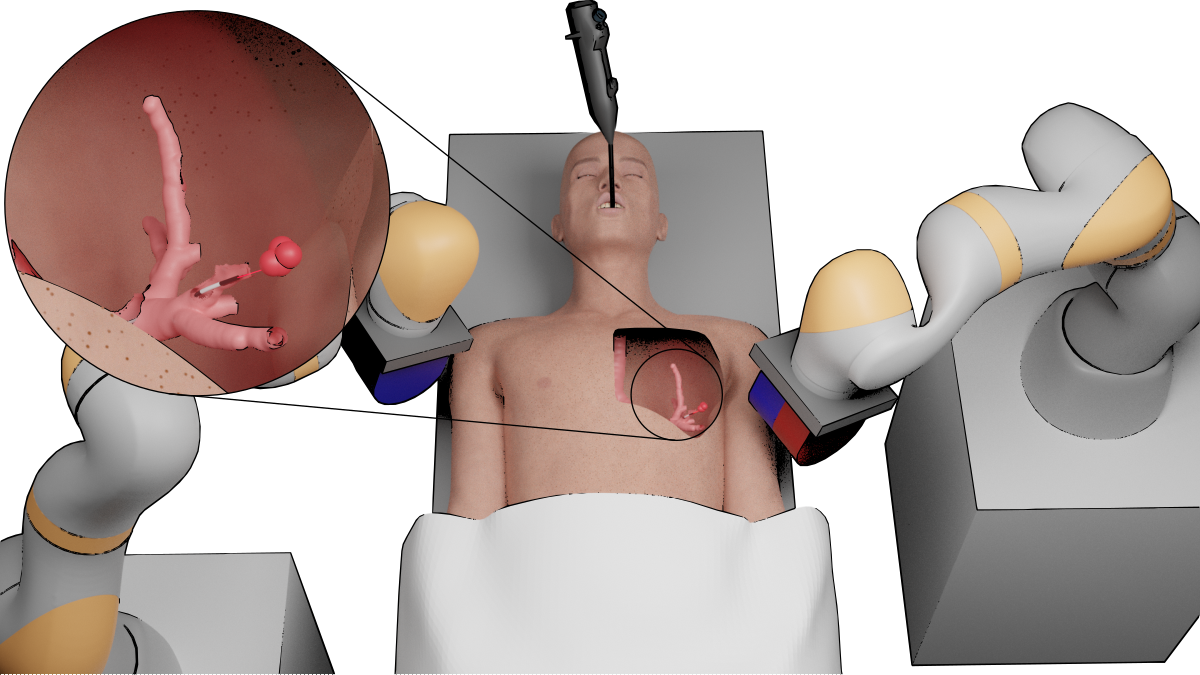 Personalized magnetic tentacles for targeted photothermal cancer therapy in peripheral lungsNature Communications Engineering, Jul 2023
Personalized magnetic tentacles for targeted photothermal cancer therapy in peripheral lungsNature Communications Engineering, Jul 2023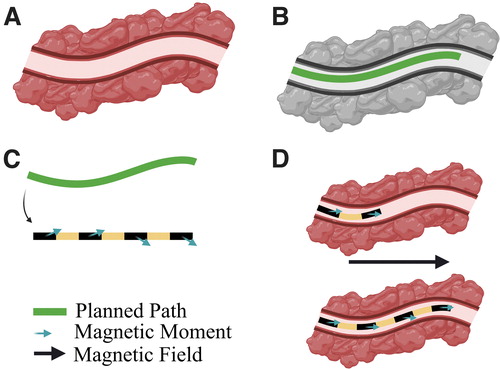 Patient-Specific Magnetic Catheters for Atraumatic Autonomous EndoscopySoft Robotics, Jul 2022PMID: 35312350
Patient-Specific Magnetic Catheters for Atraumatic Autonomous EndoscopySoft Robotics, Jul 2022PMID: 35312350