Endoluminal Devices Actuated with Single Magnet
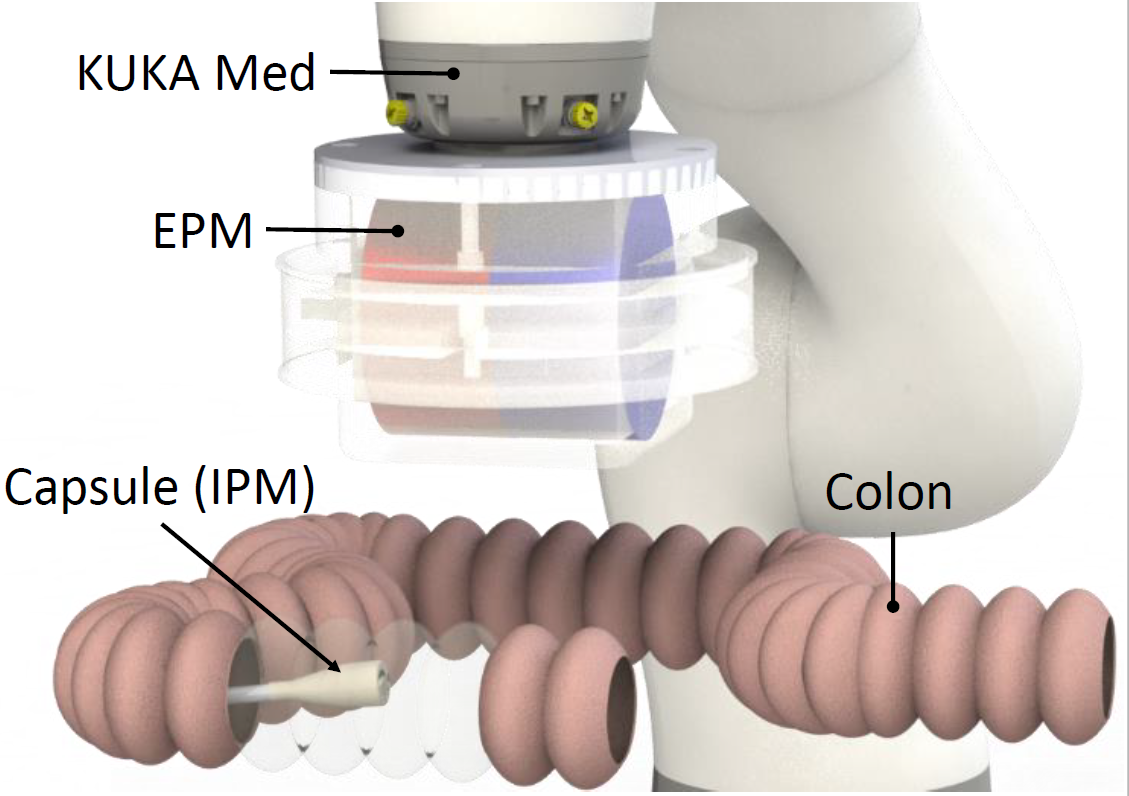
Colorectal cancer affects 1 in 23 for men and 1 in 26 for women, and early screening is fundamental for survival. Since the colon is composed of many folds, optimal navigation of the endoscope is to follow the centerline of the lumen and avoid contact with the surroundings. To guarantee that, I developed a levitation method which, using real-time localization and dynamic control approaches, to guarantee balance between gravity and magnetic attraction. The External Permanent Magnet (EPM) was robotically manipulated to guarantee that the Internal Permanent Magnet (IPM) would levitate. This first successful attempt to levitate a magnetic endoscope was published in two papers in two papers in IEEE Robotics and Automation Letters (IEEE RA-L) and presented at IEEE ICRA 2019 and IROS 2019. These papers received hundreds of citations to-date and the platform is currently undergoing clinical trials.
References
2019
- Magnetic Levitation for Soft-Tethered Capsule Colonoscopy Actuated With a Single Permanent Magnet: A Dynamic Control ApproachIEEE Robotics and Automation Letters, 2019
- Adaptive Dynamic Control for Magnetically Actuated Medical RobotsIEEE Robotics and Automation Letters, 2019